Chapter 10
Chapter summary
Higher levels of processing in spatial vision can be divided into two broad stages: Shape representation, and object representation.
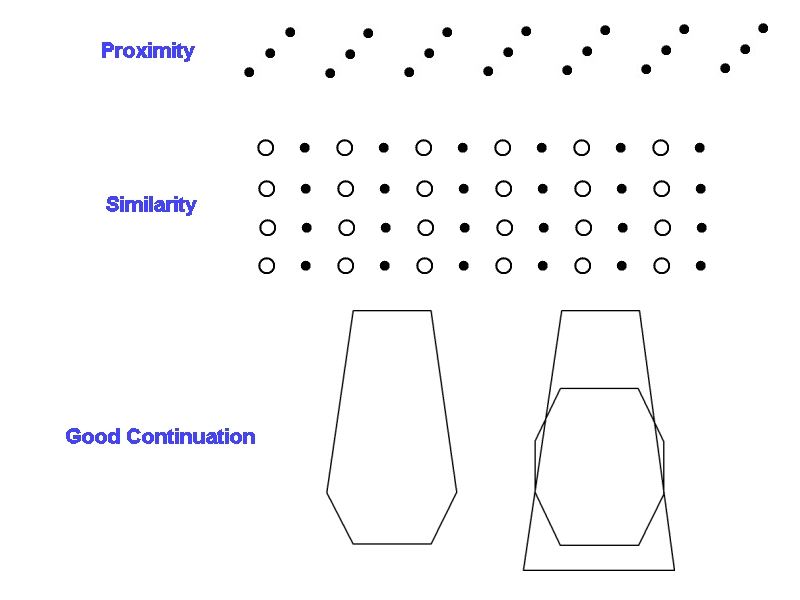
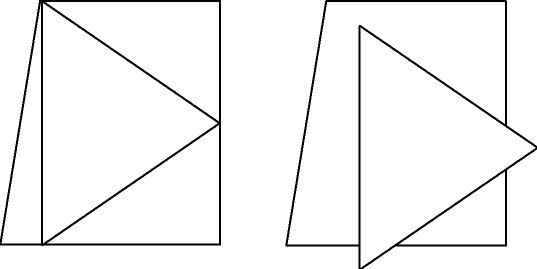
Gestalt laws describe the tendency for image elements to be grouped together into regions and shapes on the basis of properties such as proximity, similarity, common fate, and good continuation. Gestalt laws reflect the properties of real-world objects. Shape analysis may also involve a parsing operation to link together disconnected shapes that belong to the same object.
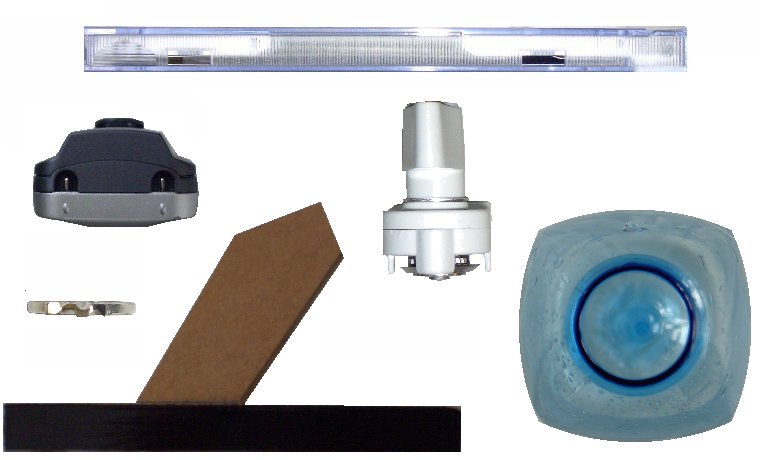
Object representations are used to recognise an object as belonging to a class (mugs, for example), to discriminate between objects within a class (individual mugs), and to interact with objects (pick up a mug). The images of objects reflect both intrinsic factors such as their shape and extrinsic factors such as lighting conditions. View-independent theories propose that the visual system removes all extrinsic influences, whereas view-dependent theories store objects in terms of a few prototypical views. Neurophysiological evidence favours view-based theories.
Scene background is known to facilitate object recognition, either by activating representations of objects that are likely to occur or by rapid categorization of scene gist. But very little is retained about a scene from one glance to the next, apart from gist and layout.
Key terms
Multiple choice quiz
Gap-fill quiz
Demos
Demo 10.1
Demo 10.3
Demo 10.4
Demo 10.5
